
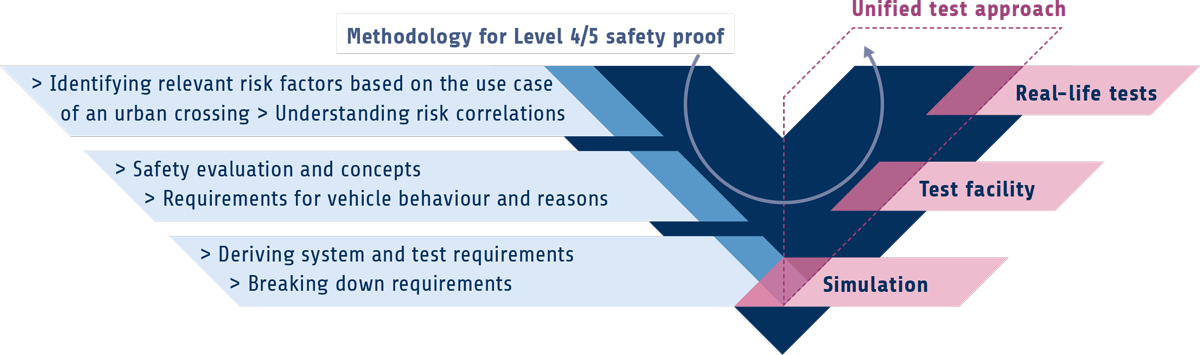
Methodology for efficient control of the test area
The VVM project analyses causal relationships that lead to critical situations and accidents in urban road traffic on the basis of the Urban Intersection Use Case. The causal relationships will be analysed, classified, generalised to scenarios and a safety evaluation will be conducted. On this basis, safety concepts and requirements will be developed that guarantee the safe operation of vehicles. From these requirements and safety concepts for the behaviour of vehicles, system requirements and test procedures will then be derived.