

Safety
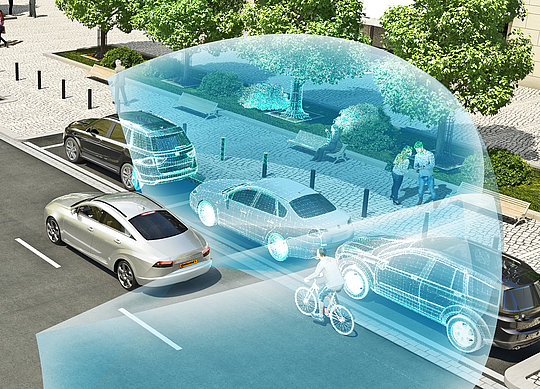
The urban environment represents one of the greatest challenges for automated vehicles due to the enormous complexity of traffic scenarios and the high diversity of potential road users. This complexity and diversity of urban traffic scenarios must be mastered safely and reliably for people to be willing to use automated vehicles in urban environments.
A key factor for the acceptance and introduction of this new technology is therefore the proof of safety, verification and validation of automated vehicles. This topic is the focus of the VVM project, which takes up the work of the PEGASUS project in the areas of testing and validation. It continues this work with the aim to develop a methodology for the proof of safety for urban driving, especially for the use case of urban intersections.
Developing testing methods
Up to now, the proof of safety for each new development has been obtained by means of lengthy and cost-intensive real-life tests. With the increasing complexity and ever shorter development cycles for automated vehicles, this approach is becoming increasingly difficult. For this reason, 22 prominent partners from industry and science are working in the VVM project to utilise the possibilities of digitalisation: In the interplay of simulations and real world tests, suitable methods will be found to demonstrate the safety of automated vehicles and to set standards for the establishment of safety verification in the industrial development process.




















